
こんにちは。hoimiと申します。
今回は「ドローンの操縦の仕方」や「センサ類」について解説しています。
ドローンにはどんなセンサー類が搭載されていて、それぞれの役目はどういったものなんだろうか…
気になる人もいたりすると思うので、簡単ではありますが紹介していきたいと思います。
- 自己紹介
- 日本ドローン操縦士検定3級を保有。
- 国土交通省、包括申請承認済み。
- 2024年7月、二等無人航空機操縦士資格取得。
- 40代会社員
この記事を読んでいただくと
- ドローンの構造(搭載されているセンサー等)
- プロペラの回転と揚力の関係
- 安全な操縦の仕方
についてご理解いただけると思いますので、ぜひ最後までご覧いただければと思います。
もくじ
ドローンのセンサ類
- GNSSセンサ
- 気圧センサ
- 地磁気センサ
- 超音波センサ
- 加速度センサ
- ジャイロセンサ
- 障害物センサ
ザックリですが、主に上記のようなセンサが搭載されています。
GNSSセンサ
地球の衛星から発信される情報(GPS等の情報)を活用しドローンの位置・高度を取得する。
これによってドローンがその場に留まるように制御できる。
気圧センサ
高度計。気圧の変化を読み取り、高度を計測する。高度が上がるほど気圧は下がる。
地磁気センサ
地球の磁力を検出してその情報から機体の方位や姿勢を制御する。
超音波センサ
音波の反射時間から高度を計測する。
加速度センサ
単位時間当たりの加速度を検出する。
ジャイロセンサ(角速度センサ)
角度の速度を計測し、機体の傾きの変化を検出することで、水平を保つ
人間でいうと三半規管のような役割をし、ロール、ピッチ、ヨーという3つの軸を制御する。
障害物センサ
障害物検知センサとして高額なドローンには「光学センサと赤外線センサ」がついている機体もある。(DJI Mavic2シリーズ以上、Phanton 4Proなど)
加速度センサの機能は、「単位時間あたりの速度の変化を検出します」。
たとえば、ドローンの飛行中に風が吹いた場合、GPSと連携してドローン本体が風に流されないように制御します。
少々の風がある中でもホバリング維持ができるのは、加速度センサーのおかげでもあります。
ジャイロセンサの機能は、「角速度を計算し、傾きの変化を検出します」
たとえば、風で機体が右に少し傾いた場合は下記のような制御を自動で行ってくれます。
- その角度の変化を検出したら
- フライトコントローラーに伝え
- 右側のプロペラの回転数を上げる
- 傾いた右側が上がり水平に戻す
といった具合に調整してくれます。
ちなみに、フライトコントローラーとは、フライトコントロールシステムのことで、搭載されている各種センサからの情報や送信機から発信された情報を処理して機体を制御するための信号を送るためのシステムのことを言います。
障害物検知センサは、DJI Mavic2シリーズ以上には全方位(前方・側面・後方・上方・下方)をカバーする光学・赤外線センサが搭載。
光学センサにはポジショニングカメラ搭載することによって地表面の状態を撮影してドローン本体の水平を維持したり、離着陸を安定して行ったりすることができる様になりました。
さらにAPASという「障害物自動回避フライト機能」という「障害物を避けながら適切に飛行できるような飛行経路」を自動で計画する機能まで搭載されているようです。
Amazonや楽天等でも最新の「Mavic 3 Pro」なら
最安値セットにしても26万円を超えるだけのことはあります。
ちなみにMavic 3 Pro CINEだとAmazonで56万円以上します。(2024年5月で)

IMU Calibrationとは

「IMUキャリブレーション」とは、ジャイロセンサと加速度センサの調整を行うもの。
何らかの原因でドローン本体の「水平」がずれた位置に定まった場合、正常な飛行が出来なくなってしまいます。
それを防ぐため、定期的にIMUの状態をプロポの画面上で、正常の状態かを確認する必要があります。
IMUとは、機体の姿勢制御を行うためのセンサの総称です。
Calibrationは、計器を用いた測定・調整を言います。
プロペラの回転と揚力の関係
ドローン。いわゆるマルチコプターは、3つ以上のローターが搭載された回転翼機のことをいいます。
プロペラの数が多い方が安定した飛行が可能で、より重たい物を運べます。
- トライコプター (プロペラ数3つ)tri:3つの~
- クアッドコプター (プロペラ数4つ)quad:4つの~
- ヘキサコプター (プロペラ数6つ)hexa:6つの~
- オクトコプター (プロペラ数8つ)octo:8つの~
クアッドコプター:いわゆる一般向け「お馴染み」のドローン

ヘキサコプター:一眼レフカメラ等が搭載可能なドローンが多い。

オクトコプター:農薬散布機など産業用ドローン

ドローンのプロペラは、
機体の重量を支える「揚力」と
空気抵抗に勝って前方に進む「推力」を生み出している。
どうやって浮いてる?機体の制御と飛行原理について
クワッドコプター(一般向けドローン)では4つのプロペラを回転させることで「揚力」を発生させて機体を浮かせています。
プロポ(送信機)でホバリング、前進、後進、左右移動の操作に応じて4つのプロペラの回転速度が調整されることで操作に従った動きをしてくれます。
「ホバリング」はプロペラの回転力で得た揚力と機体の重量を釣り合わせることで、空中に静止した状態を保つことをいいます。
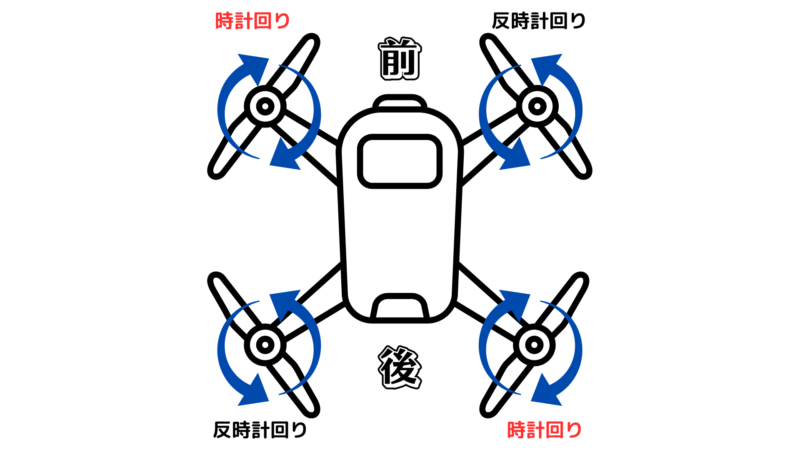
図をご覧になっていただくと分かるように、ドローンのプロペラの回転方向は全て同じではなく、
4つの隣り合うプロペラは互い違いの回転になっています。(逆回転)
もし、全てのプロペラが同じ方向に回転すると、機体自体が回転してしまいます。
それを防ぐために隣り合うプロペラが逆回転し、1つのプロペラで発生した反トルクを隣のプロペラで相殺している。
これによって揚力を生み、水平で安定したホバリングが出来るようになっています。
- 反トルク:動力が回転運動する時に生じる回転力の反作用のこと
ロール・ピッチ・ヨー軸とは
機体の姿勢に関する概念も見ておきましょう。
- 「ロール」機体を左右に傾ける回転。
- 「ピッチ」機体の機首を上げ下げする回転。
- 「ヨー」 機体を上から見たときの機首の左右の回転。
送信機で行う操縦と組み合わせると
エルロン:ロールを変化させて機体を左右に傾ける。
エレベーター:ピッチを変化させて機体の機首を上げ下げする。
ラダー:ヨーを変化させて機体を上から見たときの機首の左右の回転を制御する。
プロポ(送信機)のスティック操作
プロポの操作には、「モード1」~「モード4」の数種類存在します。
現在のドローンの操縦では「モード2」が一般的です。
100g未満のトイドローンの中には「モード1」非対応の場合もあるようで、今後も「モード2」が普及されていくことが予測されます。
僕が受けた国の登録講習機関のドローンスクール実地審査でも「モード2」の確認が項目に入ってました。
「モード1」はドローンが普及するずっと前からあるラジコンヘリの操縦モードだった為、ベテランの方はモード1での操縦が多いようですが、こだわらないのであれば、
初心者は「モード2」での操作を覚えましょう。
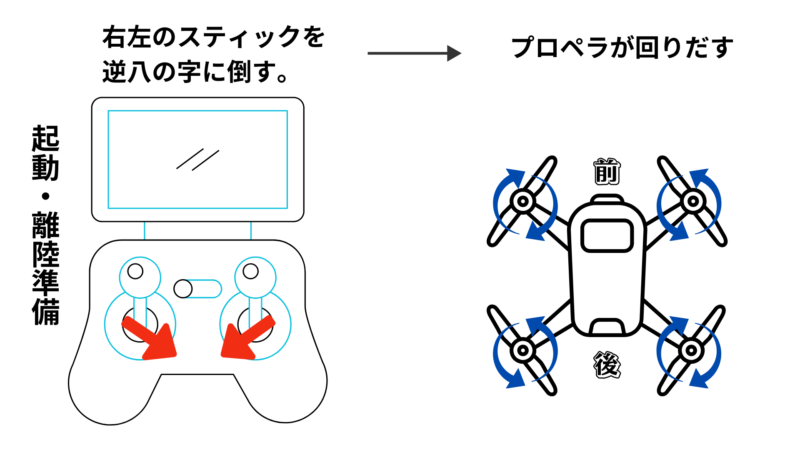
ドローンの起動・離陸
- 左側のスティックを右下に動かす。
- 右側のスティックを左下に動かす。
- ❶と❷を「同時」に目いっぱいV字型に動かすとプロペラが回転し始め、
- 左側のコントロールスティックを上に動かせばドローンは離陸する。
ドローンの着陸
「着陸の準備ができたら」左側のスティックを下に倒し続ける。
ホバリング
ドローンが空中に浮いたら、左右のスティックはどちらも動かさないまま。
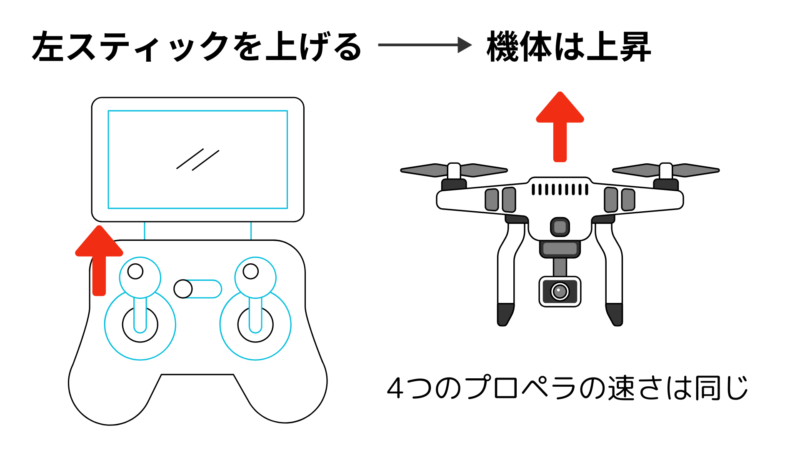
スロットル
ドローンの上下移動。上昇・下降させることをスロットルといい、高度を制御します。
左スティックを上下に動かすと機体の上昇・下降がされる。
- 左スティックを上げる→上昇する。
スティックを上に倒せば倒すほどプロペラの回転数は速くなり、より速いスピードで上昇します。
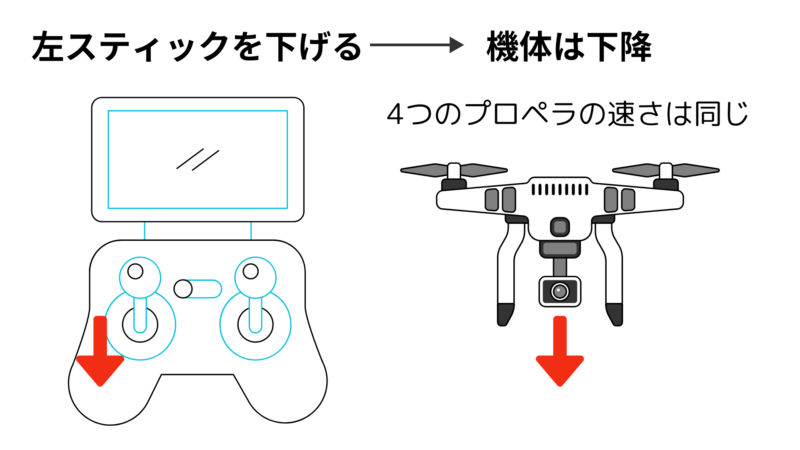
- 左スティックを下げる→下降する。
スティックを下に倒せば倒すほどプロペラの回転数は遅くなり、より速いスピードで下降します。
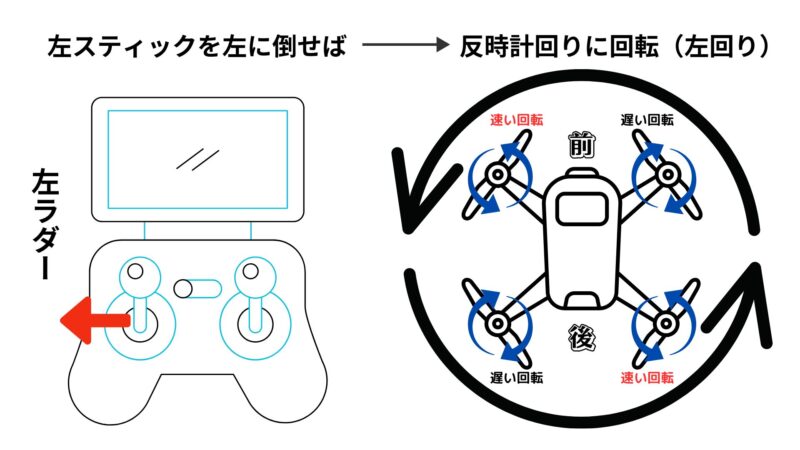
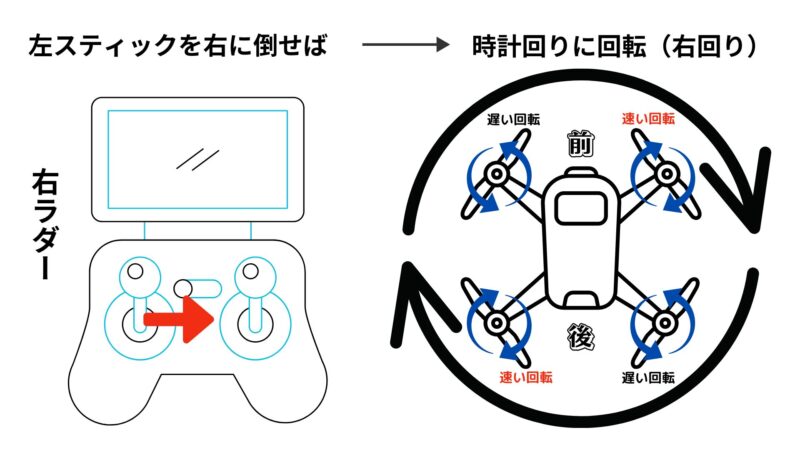
ラダー
ホバリング状態からドローンを回転させることをラダーといいます。
対角線上の2つのモーターの回転数を上げることで機体は左右どちらかに向きを変え回転します。
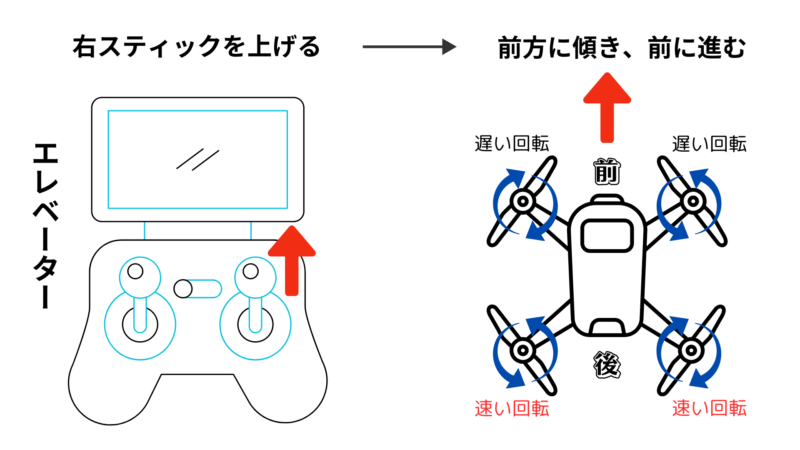
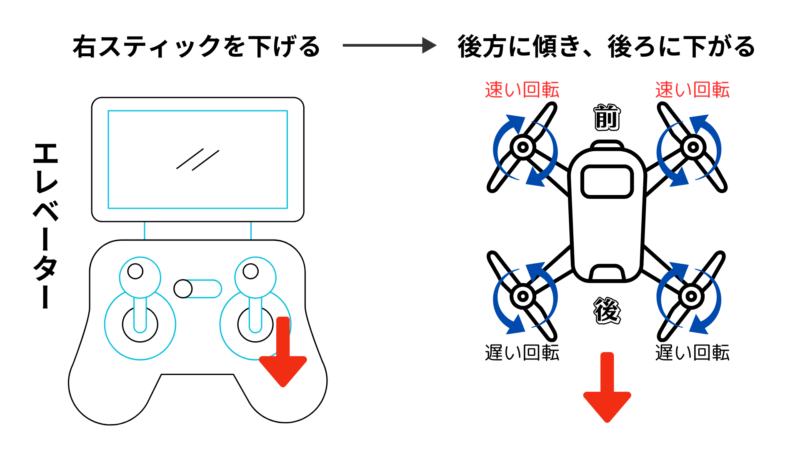
エレベーター
ドローンを前後に移動させる動きをエレベーターといいます。
- 右スティックを上にあげると→前進する
- 右スティックを下にさげると→後退する
右スティックの上下操作でローターの回転数が制御され、揚力に差がでるため
機体のピッチ(傾斜角度)が変更されます。
スティックを倒せば倒すほど、機体の移動速度は速くなります。
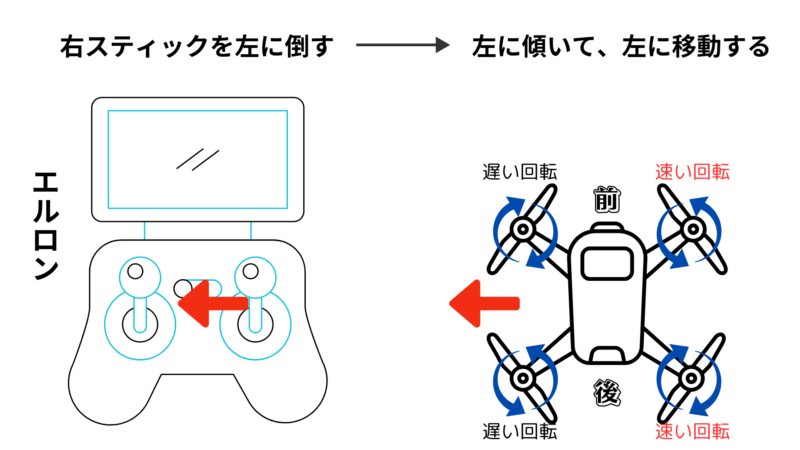
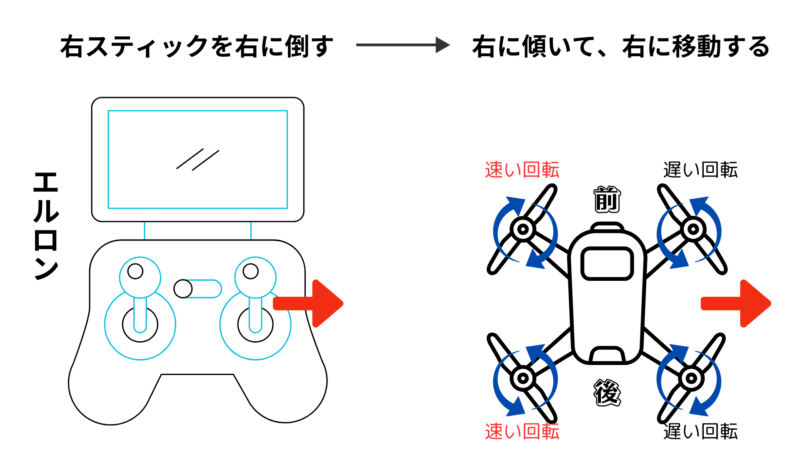
エルロン
ドローンをを左右に移動させることをエルロンといいます。
- 左に移動したい場合は「右側」の
- 右に移動したい場合は「左側」の
プロペラを速く回転させることで移動したい側に機体は傾く状態となり、進みます。
スティックを倒せば倒すほど、機体の移動速度は速くなります。
まとめ
マルチコプター型のドローンは
- 「揚力」によって機体は持ち上がる。
- 各プロペラの回転数を制御することで、揚力の差を生み出し機体を傾けて移動させる
- それぞれのプロペラが作用し合うことによって揚力を生み自由な飛行が可能となっている。
プロペラ数の多い「ヘキサコプター」や「オクトコプター」は一部が破損しても偶数枚あれば高い安定性こそ失うが、飛行はできる。
クアッドコプター(プロペラ4つ)
いわゆる一般向け「お馴染み」のドローンは、
プロペラが1か所でも止まると墜落します。
ドローンを飛行させる前は点検をお忘れなく。
最後までご覧になって頂きありがとうございました。
\ 最新情報をチェック /